http://dx.doi.org/10.5762/KAIS.2013.14.10.5215
Journal of the Korea Academia-Industrial cooperation Society Vol. 14, No. 10 pp. 5215-5220, 2013
1*
VRS-GPS 자동측위시스템을 이용한 해안매립지 측량
Abstract
Abstract
남광우 1 경성대학교 도시공학과 Measurements Coastal landfill Using Automatic VRS-GPS Surveying Kwang-Woo Nam 1* 1 Department of Urban Design & Development, Kyungsung University 요 약 최근 건설현장에서는 3D 기피 현상으로 자동화에 대한 관심이 증대되고 있다 . 본 연구는 개발된 VRS-GPS 기반 자동 측위시스템으로 해안매립지를 측량한 결과에 관한 연구이다 . 자동측위시스템에 설치된 GPS 는 GRX1 수신 기와 SHC250 컨트롤러를 사용하였다 . 자동측위시스템은 DSP 모듈 , 지자기센서 , 블루투스 , 짐벌 , IMU 등으로 구성되어 있으며 , 입력된 위치경로로 자동주행이 가능하도록 하였다 . 개발된 GPS 자동측위시스템은 전방과 구심점 관측 카메 라를 설치하여 측량상황을 스마트폰으로 실시간으로 파악 할 수 있도록 하였다 . 개발된 자동측위시스템을 건설현장에 적용하여 실험한 결과 평균제곱근오차는 X 축에서 0.009m, Y 측에서 0.010m, 높이는 0.002m 로 나타났으며 , 현장적용 가능성이 있음을 확인하였다 .
Recent construction in the field of 3D aversion is increasing interest in automation. This study is results about survey of the coastal landfill using automatic VRS-GPS surveying system. GPS is made with GRXI and SHC250 controller. Automatic surveying system is composed of DPS module, geomagnetism sensor, bluetooth, gimbals, IMU, etc and enables an automatic driving via entered into a route of position. The developed auto surveying system has installed the front and camera for vertical axis and can grasp situation of surveying with smartphone in real time. The comparative result between surveyed result with repetition method auto VRS-GPS surveying system observed surveyed result with VRS-RTK has shown that average error of x-axis is 0.009m, average error of y-axis, 0.010m and average error of height, 0.002m. This possibility was confirmed that field application. Key Words : Coastal Landfill, Automatic VRS-GPS surveying system, DPS module, geomagnetism sensor, bluetooth, gimbals, IMU
GPS신호의
1. 서론
2. 본론
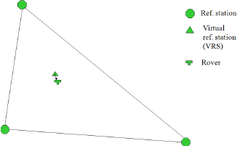
방법을 이용하여 거창 황강에서 하천현황측량을 실시하 고 그 결과를 기존의 주요한 하천측량기술이었던 토탈스 테이션에 의한 측량결과와 비교하여 하천현황측량에 있 어서 RTK GPS에 의한 측량방법이 토탈스테이션에 의한 방법 보다 효율적임을 증명하였다[3]. H. Choi 등은 상시 관측소 데이터를 이용하여 지적기준점에 대하여 가상기 지국 방식을 통한 데이터를 비교ᆞ분석하였다. 관측결과, 가상기준망(VRS; Virtual Reference Station) GPS측량 지적기준점을 관측한 토털스테이션을 사용하여 배각법으 방식은 Network RTK GPS측량 방식 중 한 가지 방법으 로 관측한 성과와 VRS-RTK로 관측한 성과를 비교한 결 로 GPS 상시관측소로 이루어진 기준국망을 이용하여 오 과 X축 평균오차 -0.08m, Y축 평균오차 +0.07m, 평균거 차를 분리하여 모델링하고, 네트워크 내부 임의의 위치에 리오차 0.11m로 나타남을 발표하였다[4]. 서 관측된 것과 같은 가상기준점을 생성한 후 이 가상기 VRS-GPS방식에 따른 공간정보획득은 매우 우수한 기 준점과 이동국과의 실시간이동측량을 통하여 정밀한 이 법임에도 불구하고, 환경조건의 제약이 따른다. 최근 위 동국의 위치를 결정하는 측량방법이다. 가상기준망 GPS 험하고 힘든 일과 단순 노동에 사람들을 대신할 자동화 측량방식은 네트워크 내의 실제 기준국을 이용하여 이동 기기의 필요성이 강조되어 많은 연구와 여러 분야에서 국에서 가까운 지점에 가상기준국을 생성한 후 데이터를 사람들을 대신해서 임무를 수행하는 고성능 로봇이 개발 중앙서버로 전송한다. 그리고 기준국에 형성된 네트워크 이 필요하다. 따라서 본 연구에서는 자율주행이 가능한 를 이용해 계산된 보정 값을 수신하여 가상기준국에 대 GPS 자동측위시스템을 개발하였다. 개발된 GPS 자동측 한 위치를 재계산 한뒤 이동국에 대한 정확한 위치를 결 위시스템으로 해안 매립지 관측을 실시하여, 정확도를 분 정하는 방식이다. 이 VRS GPS측량 방식의 가장 큰 특징 석하고자 한다. 은 기존의 Network RTK GPS측량 방식이 기지국에 1대, 이동국에 1대 총 2대의 수신기를 필요로 했던 것을 국내 에 24시간 가동 중인 국토지리정보원에서 운영하는 상시 관측소의 데이터를 사용함으로써 1대의 수신기와 블루투 스 통신이 가능한 1대의 휴대전화로 GPS측량이 가능하다.
2.1 VRS-GPS의 개념
2.2 GPS 자동측위시스템
RTK-GPS(RTK; Real Time Kinematic)방식은 경리정 리지구, 택지개발지구 등과 같이 전파수신에 장애가 없는 지역에서는 토탈스테이션 보다 효율적이다. RTK-GPS는 개발된 GPS 자동측위시스템은 건설현장에서 신속하 알고 있는 한 점에 기준국을 설치하고 미지의 다른 점에 고 안정적으로 구동하기 위해 직경 42.0cm의 4바퀴 전후 이동국을 설치한 후, 기준국에서 이동국으로 보정치를 전 조향을 채택하였으며, 전방카메라와 구심카메라를 설치
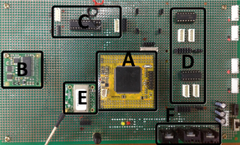
2주파(L1, L2)를 수신하며, 정지측량 시 H방향 다. 그러기 위해서 짐벌 기구는 두 축을 제어하는 모터와 3mm+0.5ppm, V방향 5mm+0.5ppm, RTK측량 시 H방향 IMU의 각도 정보를 수신하기 위하여 별도의 시스템 보 10mm+1ppm, V방향 15mm+1ppm의 정확도를 가진다 드를 제작하였다. 짐벌 기구부의 시스템 보드는 그림 30 [Table 1]. 세부 제원은 Table 1과 같다. 과 같이 1마이크로컨트롤러 모듈(A), 2RS-232 to RS-485 컨버터 모듈(B), 3CAN 통신 커넥터(C), 4 RS-485 커넥터(D), 그리고 5전원부(E)로 구성되어있으 며, 정확도는 0.05° 이다.
C D
B [Fig. 2] GPS Auto- Surveying system E [Table 1] Location accuracy of the GRX1 receiver A Location accuracy H : 3mm+0.5ppm, L1+L2 Precision stop V : 5mm+0.5ppm measurements H : 3mm+0.8ppm [Fig. 4] Gimbal on system boards. L1 only V : 4mm+1.0ppm Quick-stop H : 3mm+0.5ppm L1+L2 짐벌 기구부는 두 개의 모터를 사용하여 x와 y 두 축 measurements V : 5mm+0.5ppm H : 10mm+1.0ppm 을 제어하여 측량용 GPS의 수평을 유지한다[Fig. 6]. kinematic L1+L2 V : 15mm+1.0ppm H : 10mm+1.0ppm RTK L1+L2 DGPS V : 15mm+1.0ppm 0.5m l 5 h 3 θ 2.2.2 매인보드 2 GPS 자동측위시스템을 제어하기 위해서는 주행과 측 l 4 h 2 량을 담당하는 매인보드가 필요하다[Fig. 4]. 본 연구를 위해서 구성된 매인보드이며 DSP모듈(A), 지자기센서 θ 1 (B), 모터드라이버 통신부(C), 엔코더 데이터 수신부(D), 블루투스(E), 전원부(F)로 구성된다. l 1 h 1
l 2 l 3 [Fig. 5] Height measurement of gimbals 지면에 따른 짐벌 기구부의 높이 는 다음과 같이 주 어진다.
(1)
과 같이 주어진다.
3. 해안매립지 현장 측량
므로, 설치된 측점의 좌표를 미리 입력시켜 측점 부근까 지는 자동으로 GPS 자동측위시스템이 이동하게 설계되 었다. 측점 부근에서는 GPS자동측위시스템을 구심확인 (2) 용 카메라로 위치를 확인 하면서 원격 이동하였다. 개발 된 GPS자동측위시스템은 초기 모델이라 대단지 또는 매 립지등의 평지지역에서 구동이 가능하게 설계되어 있다. 따라서, 구심확인용 카메라는 GPS의 수직지점에 설치되 어 있으며, 짐벌 작동에 따른 높이값에 대한 보정은 미미 하므로 별도의 보정은 하지 않았다. 실험을 위해서 노트 3.1 연구대상지역 북 컴퓨터 2대를 사용하였으며, 이 중 1대는 GPS 자동측 위시스템의 구동을 위해 사용하였고, 나머지 1대는 전방 본 연구를 위해 선택된 해안매립지는 경남 창원시 마 및 하면 카메라를 통한 영상수집을 위해 사용하였다[Fig. 산합포구 가포동의 마산가포신항 배후부지 건설현장이 7]. 원거리에서 노트북 컴퓨터로 GPS 자동측위시스템을 다. 마창대교 가포IC부근 마산가포신항이 최근 준공을 구동하며, 영상수집을 위한 다른 1대의 노트북 컴퓨터상 했고, 배후부지 조성을 위해 시공중에 있다[Fig. 6]. 의 영상으로 수 cm의 수평정확도를 가지는 구심을 확인 하며 측량을 실시하였다.
3.2 측량 결과 VRS측량을 통한 측점별 성과와 GPS 자동측위시스 템을 통한 성과 모두 GRS80 세계측지계 좌표이며, 각각 의 결과는 Table 2와 Table 3과 같다. VRS측량성과를 기준으로 GPS 자동측위시스템의 측 량성과를 비교한 편차는 Fig. 8과 같으며, RMSE는 N방 향 0.010m, E방향 0.009m, H방향 0.002m로 나타났으며, GPS 자동측위시스템의 활용이 가능할 것으로 판단된다.[Fig. 6] Test Area[Fig. 8] deviation according to surveying
해안 매립지에 30개의 측점을 설치하여[Fig. 6], GPS 자동측위시스템을 통한 측량성과와 VRS GPS측량을 통 한 성과를 서로 비교하여 오차를 결정함으로서 정확성을 비교 분석 하였다. 일반적으로 건설현장에서 사용하는 측 량의 기준이 되는 좌표는 근거리의 기준점에서부터 좌표 측량을 통해 현장 내에 임시 좌표를 설치하여 사용하므
11 285718.088 161192.905 5.117 12 285730.378 161198.885 4.806 13 285728.680 161209.572 4.578 14 285720.046 161219.331 4.342 15 285708.359 161226.721 4.166 16 285695.917 161229.859 4.400 17 285681.816 161232.393 4.650 18 285670.704 161234.198 4.893 19 285658.465 161240.113 4.955 20 285644.611 161244.796 4.734 21 285633.486 161252.657 4.805 22 285632.234 161257.789 4.789 23 285630.564 161264.972 4.909 24 285626.733 161276.392 4.477 25 285615.380 161282.829 4.358 26 285604.344 161285.640 4.546 27 285592.040 161285.296 4.902 28 285588.961 161273.862 5.344 29 285605.534 161264.673 5.092 30 285612.409 161253.253 5.355
4. 결론
족, 무선통신장애, 구동모터 불량 등 이었다. 초기 오류는 추가 연구와 지속적인 보완으로 대부분 해결되었으나, 원 활한 시스템의 구동을 위해 지속적인 추가연구를 할 예 정이다.
References
- [1] Ministry of Construction & Transportation, "The Development of On-line GPS location information Provision System", Research Report, p. 1.
- [2] H. I. Kim, G. S. YU, K. D. Park, J. H. Ha, "Accuracy Evaluation of VRS RTK Surveys Inside the GPS CORS Network Operated by National Geographic Information Institute" Korean Journal of Geomatics, Vol.26, No2, pp.139-147, 2008.
- [3] S. B. Lee and B. Y. Choi, “Hydrographic surveying in river by RTK GPS”, Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol.25, No.3, pp.267-275, 2007.
- [4] H. Choi and K.C. Kim, “Accuracy Analysis of Cadastral Control Points Surveying using VRS case by Jinju city parts DOI: http://dx.doi.org/10.7848/ksgpc.2012.30.4.413 남 광 우 (Kwang-Woo Nam) [정회원] • 1996년 2월 : 동아대학교 도시공 학과 (공학사) • 1998년 2월 : 부산대학교 대학원 GIS학과 (공학석사) • 2001년 8월 : 부산대학교 대학원 GIS학과 (공학박사) • 2003년 3월 ~ 현재 : 경성대학교 도시공학과 부교수
- <관심분야> 도시모델링, 도시공간구조, GIS 응용, U-City
2.1.1 VRS-GPS의 개념
2.2.1 개요