한국산학기술학회논문지 Vol. 11, No. 9 pp. 3571-3577, 2010
* 교신저자 : 이동명(dmlee@tu.ac.kr) 접수일 10년 07월 26일 수정일 10년 09월 02일
게재확정일 10년 09월 08일
3571
한국산학기술학회논문지 제11권 제9호, 2010
이 제시되었다[11]. 두 번째, 핑거프린트의 데이터 셋으로부터 현재 측정
[5] 선택된 큰 범위를 보정 예를 들어 a2+c2 > b2+d2 일 때,
3572
예상 위치좌표 탐색기법을 적용한 균등거리비율 기반 위치인식 보정 알고리즘 연구
정된 Ranging 값이 Ranging 값으로 가질 수 있는 범위 보 AEDR은 SDS-TWR보다 위치인식 성능이 우수하지만, 알
3573
한국산학기술학회논문지 제11권 제9호, 2010
리 a, b, c, d를 Ranging 버퍼에 저장한다. a, b, c, d는 비
두 번째, 체크된 개수가 2개 이상일 경우, 체크된
3574
예상 위치좌표 탐색기법을 적용한 균등거리비율 기반 위치인식 보정 알고리즘 연구
0.41m 발생하였으나 E&E 보정 알고리즘의 적용으로
실험환경은 싱크노드 1개, 이동노드 1개, 비컨노드 4
3575
한국산학기술학회논문지 제11권 제9호, 2010
예상 위치좌표 탐색기법을 적용한 균등거리비율 기반 위치인식 보정 알고리즘 연구
Seong Ki Kwon1, Dong Myung Lee1*, Chang Bum Lee
Abstract
The estimated location coordinator exploration scheme and the E&E(Equivalent distance rate & Estimated location coordinator exploration) compensation algorithm for localization is proposed, and the performance of the E&E is analyzed in this paper. The proposed scheme is adapted to the AEDR(Algorithm for localization using the concept of Equivalent Distance Rate). From several experiments, it is confirmed that the performance of the localization compensation in SDS-TWR is improved from 0.60m to 0.34m in four experimental scenarios, and the performance of the localization compensation ratio of the E&E is also better than that of the AEDR as a level of maximum 15%. It can be thought that the proposed localization compensation algorithm E&E can be sufficiently applicable to various localization applications because the performance of the localization error rate of the E&E is measured as less than 1m in 99% of the total performance experiments. Key Words : USN, CSS, IEEE 802.15.4a, SDS-TWR, Ranging, Localization, RTLS
권성기 1 , 이동명 1* , 이창범 2
A Study of Compensation Algorithm for Localization based on Equivalent Distance Rate using Estimated Location Coordinator Searching Scheme 2
요 약 본 논문에서는 예상 위치좌표 탐색기법과 이를 균등거리비율 개념인 AEDR(Algorithm for localization using the concept of Equivalent Distance Rate) 에 적용한 위치인식 보정 알고리즘인 E&E(Equivalent distance rate & Estimated location coordinator exploration) 를 제안 한 후 실험을 통해 성능을 분석하였다 . 실험결과 , E&E 는 4 개의 시 나리오에서 SDS-TWR 의 위치인식 보정성능을 0.60m 에서 0.34m 로 0.26m 만큼 향상시켰고 , E&E 는 설정된 시나리오에 따라 기존에 제안된 AEDR 과 비교한 결과 위치인식 보정 성능비율이 최대 15% 만큼 우수함을 확인하였다 . 또한 E&E 의 전체 성능실험 중 99% 에서 위치인식 오차가 1m 이내로 측정되었는데 이 정도의 위치인식 보정 성능이라면 제안하는 알고리즘인 E&E 는 다양한 위치인식 응용분야에 충분히 적용 가능 할 것으로 판단된다 .
1. 서론 게이션 시스템이 있으며, 이러한 기술을 응용하여 최근에 는 스마트 하이웨이 시스템이 개발 중에 있다. 또한 실내 오늘날 유비쿼터스 컴퓨팅의 눈부신 발전에 따라 과거 위치인식은 다양한 홈 네트워크 시스템에 적용되어 생활 에 상상하지도 못했던 다양한 서비스 해택을 누리고 있 의 편리함을 제공한다[1-4]. 다. 대표적인 예로 실외 위치인식의 GPS를 이용한 네비 이러한 실내 위치인식 서비스는 초기에 RFID (Radio
Frequency IDentification), RSS (Received Signal 된 위치의 신호정보를 이용하고 확률모델을 적용하여 단 Strength) 기술을 기반으로 하였다. RFID 기술은 저비용 하나의 후보자를 결정하고, TDOA의 기하학적 위치결정 으로 시스템을 구축할 수 있는 장점이 있고, RSS 기술은 방법을 변형한 알고리즘을 이용하여 위치를 보정함으로 저비용, 저전력, 손쉬운 적용성을 바탕으로 가정과 산업 서 위치인식의 정확도를 향상시키는 방법도 제시되었다 자동화 외에 다양한 분야에 적용할 수 있다는 장점이 있 [12]. 다[4,5]. 세 번째, Ranging 측정이 이루어지는 두 노드의 최근에는 IEEE 802.15.4a 국제 표준규격에 CSS(Chirp Crystal Oscillators 동기화 오차를 보완하여 Ranging 오차 Spread Spectrum) 또는 IR UWB( Impulse Radio Ultra Wide 를 보정하는 방법이다. 이 방법은 SDS-TWR의 송수신 과 Band)기술이 제정되어 WPAN 분야의 위치인식 연구가 더 정에서 두 번의 Treply 과정 중 하나의 Treply를 제거함 욱 활발하게 진행되고 있다. CSS는 TOF(Time of Flight) 방 으로서, Crystal Offset의 크기를 줄여서 Ranging 오차를 식의 SDS-TWR 기술로 노드간의 거리를 구하여 단말의 위 줄인 방법이다[10]. 치를 계산한다. 그러나 SDS-TWR은 전파환경이나 장애물 로 인해 Ranging 오차가 크게 발생한다. 이에 따라 정밀한 위치인식을 위해서는 Ranging 오차를 보정하는 방법이 필 3. AEDR 의 문제점 분석 요하다[6,7,8]. 본 논문의 저자는 [9]에서 노드사이에 발생한 Ranging 3.1 AEDR 개념 오차를 보정하여 위치인식 성능을 향상시키는 방법으로 균등거리비율을 적용한 위치인식 보정 알고리즘 균등거리비율 개념의 AEDR(Algorithm for localization AEDR은 SDS-TWR에 의하여 측정된 4개의 고정된 비컨 using the concept of Equivalent Distance Rate) 위치인식 노드와 이동노드 사이의 Ranging 값을 바탕으로 대각선 보정 알고리즘을 제시하였다. AEDR은 기존의 SDS-TWR 상에 위치한 비컨노드의 Ranging 제곱의 합에 대한 비율 보다 전반적으로 위치인식 성능이 우수하였으며, 특히 원리를 적용시킨 보정 알고리즘이다[9,13]. 3m 이상의 위치인식 오차를 보정하는 성능이 뛰어났다. 그러나 AEDR은 4개의 비컨노드 중 2개 이상의 노드 에서 Ranging 오차가 크게 발생될 때에는 보정이 어려운 점과, Ranging 제곱의 합을 비교한 결과 크기가 작은 두 노드의 Ranging 값은 보정 되지 않는 문제점이 있다. 따라서 본 논문에서는 기존에 제안된 AEDR 문제점을 해결하기 위하여 먼저 예상 위치좌표 탐색기법을 제시하 고 이를 AEDR에 적용한 알고리즘인 E&E를 제안 한 후 실험을 통해 성능을 분석하였다.
[그림 1] AEDR 적용이 가능한 센서 네트워크 환경 2. 관련연구 AEDR 개념은 그림 1과 같이 비컨노드의 배치가 정사 각형 및 직사각형 형태로 구성된 환경에서 적용이 가능 SDS-TWR은 국내외 관련문헌과 실제 실험에 의해서 하며 수행과정은 다음과 같다. 확인한 결과에 의하면 실험환경에 따라 Ranging 오차(평 그리고 이동노드와 비컨노드 A, B, C, D 사이의 거리 균 0~3m, 최대 10m정도)가 매우 다양하게 발생하였다. 를 a, b, c, d라고 한다. 따라서 정밀한 위치인식을 위해서는 Ranging 오차를 감 [1] 이동노드는 4개의 비컨노드와 Ranging 수행(a, b, 소시키는 보정 알고리즘이 필요하다[8,10]. c, d값 측정) SDS-TWR의 Ranging 오차를 보정하는 방법은 국내외 [2] a, b, c, d의 값을 제곱(a2, b2, c2, d2) 에서 다양하게 제시되고 있다. 그 예로 첫 번째, 대표적인 [3] 대각선에 놓인 비컨노드의 Ranging 제곱 값을 더 보정 알고리즘인 칼만필터와 핑거프린트 방식이 있고, 칼 함(a2+c2, b2+d2) 만필터와 핑거프린트 방식을 함께 적용한 보정 알고리즘 [4] a2+c2, b2+d2의 크기를 비교하여 큰 범위를 선택
(5.1) a2 > b2+d2의 경우 a값을 보정(a2 ≒ (b2+d2) - c2) (5.2) c2 > b2+d2의 경우 c값을 보정(c2 ≒ (b2+d2) - a2) (5.3) (5.1)과 (5.2)를 만족하지 않을 경우 a와 c를 함 께 보정(n은 임의의 변수) ((a-n)2+(c-n)2 ≒b2+d2) [6] 보정된 a2, b2, c2, d2 값을 각각 루트 연산 수행 [7] 보정된 a, b, c, d 값으로 위치인식 연산 수행 3.2 AEDR 문제점 AEDR 보정 알고리즘은 [9]에서의 실험결과에 의하면 기존의 SDS-TWR보다 위치인식 정확도 성능이 더 우수 하였다. AEDR은 1m 내외의 SDS-TWR 위치인식 오차를 평균 10cm 정도 보정하였고, 3m~10m 이상의 SDS-TWR 위치인식 오차도 평균 2m 내외로 위치인식 정확도를 개 선시켰다. 그러나 AEDR은 알고리즘의 특성에 따라 위치인식 오 차를 보정하지 못하거나 보정 성능이 미미할 수 밖에 없 는 문제점이 두 가지가 있다. 첫 번째 문제점은 4개의 비컨노드 중 2개 이상의 비컨 노드에서 Ranging 값으로 가질 수 있는 범위 보다 큰 값 이 측정되었을 경우에 위치인식 오차를 보정하지 못하거 나 보정 성능이 미미하였다. 이 근거는 3m 이상의 위치 인식 오차 보정성능을 나타낸 표 1과, 임계치보다 큰 Ranging 값이 2개 이상의 비컨노드에서 측정된 경우 AEDR의 보정 성능을 나타낸 표 2에서 확인할 수 있다. 이 때 Ranging 값으로 가질 수 있는 범위 값은 √(X2+Y2) 으로 비컨노드와 비컨노드 사이의 거리를 바탕으로 설정 된 X, Y축의 거리 값이다. [표 1] 3m 이상 위치인식 오차 보정 성능 ( 단위 : 개수 ) AEDR SDS-TWR 3m 이내로 보정 3m 이상으로 보정 23 16 7 표 1에서는 전체 63개의 위치좌표 중 23개 좌표에서 3m 이상 위치인식 오차가 측정된 것과, AEDR로 보정한 이후 임계치인 3m 이내로 보정된 것이 16개 좌표인 것을 확인할 수 있다. 그러나 AEDR로 보정된 이후 7개 좌표에 서는 여전히 위치인식 오차가 3m 이상으로 측정되었는 데, 이러한 7개 위치좌표의 Ranging 값을 분석해 본 결 과, 5개의 위치좌표에서 공통적인 문제점을 발견하였다. 이것은 4개의 비컨노드 중 2개 이상의 비컨노드에서 측
다 큰 값이 측정된 것으로서 보정된 결과는 표 2와 같다. 표 2와 같이 임계치보다 큰 Ranging 값이 2개 이상 측 정되면 AEDR 적용 이후에 여전히 위치인식 오차가 크거 나 보정이 되지 않는 것을 확인할 수 있다. [표 2] 임계치보다 큰 Ranging 값이 2 개 이상의 비컨노드 에서 측정된 경우 AEDR 의 보정 성능 ( 단위 : cm) 위치좌표 SDS-TWR AEDR (2,2) 929.5 789.0 (8,5) 666.7 512.7 (6,6) 750.9 922.8 (7,6) 1977.2 310.2 (9,6) 598.5 472.5 그리고 AEDR로 보정된 이후에도 여전히 3m 이상의 오차가 측정된 7개 좌표 중 나머지 2개의 위치좌표에 대 한 분석 결과는 다음과 같다. 4개의 비컨노드 중 하나의 비컨노드에서는 임계치보다 큰 Ranging 값이 측정되고, 또 다른 하나의 비컨노드에서는 0이 측정된 경우이다. 이 런 경우도 4개의 비컨노드 중 2개 이상의 비컨노드에서 Ranging 값을 신뢰할 수 없다고 판단되기 때문에 AEDR 보정이후에도 여전히 3m 이상의 오차가 발생되었던 것 이다. 두 번째는 Ranging 제곱의 합이 작은 두 노드의 Ranging 값은 보정 되지 않는 문제점이다. 이에 대한 예 로 AEDR은 a2+c2 > b2+d2 일 때, b와 d는 보정되지 않는 다. 즉 Ranging 제곱의 합이 큰 a와 c는 보정이 되지만, Ranging 제곱의 합이 작은 b와 d는 보정이 되지 않는 문 제점이 발생한다. 만약 b와 d의 Ranging 값도 보정이 된 다면 위치인식 오차를 더 줄일 수 있다. 이러한 AEDR의 두 가지 문제점을 해결하면 기존의 AEDR보다 정밀하고 안정된 위치인식을 할 수 있다. 따 라서 본 논문에서는 예상 위치좌표 탐색기법을 AEDR에 추가로 적용하여 AEDR의 단점을 보완한다. 4. 예상 위치좌표 탐색기법을 적용한 위치인식 보정 알고리즘 4.1 설계 고려사항 본 논문은 SDS-TWR Ranging 실험에서 나타난 Ranging 오차를 보정하는 방법으로 AEDR을 이용한다.
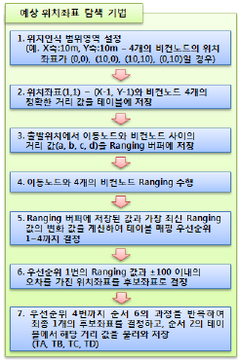
고리즘의 특성상 발생되는 문제점을 해결한다면 더욱 정 컨노드 A, B, C, D와 출발지점에 위치한 이동노드 사이 밀하고 안정된 위치인식이 가능하다. 의 거리이다. 따라서 본 논문은 예상 위치좌표 탐색기법을 AEDR에 네 번째, 이동노드와 4개의 비컨노드는 Ranging을 수 적용하여 기존의 AEDR보다 위치인식 성능효율이 위치 행한다. 인식 보정 알고리즘인 E&E(Equivalent Distance Rate & 다섯 번째, 측정된 Ranging 값과 Ranging 버퍼에 저장 Estimated Location Coordinator Exploration)를 제시한다. 된 값을 비교하여 변화 값이 작은 순서대로 비컨노드 우 또한 E&E 보정 알고리즘은 우선순위를 가진 비컨노 선순위 1~4까지 결정한다. 드들이 후보 위치좌표를 결정할 때, 각각의 비컨노드는 여섯 번째, 결정된 우선순위를 바탕으로 하여 우선순 자신의 Ranging 값과 ±100cm 에 포함되는 후보 위치좌 위 1번 비컨노드부터 자신의 Ranging 값과 ±100cm에 속 표를 결정함을 원칙으로 한다. 그 근거는 저자가 대학교 하는 후보 위치좌표를 선택한다. 강당 30m*25m의 영역에서 1m 간격으로 이동노드를 이 일곱 번째, 최대 우선순위 4번 비컨노드까지 후보 위 동하면서 Ranging 성능을 실험한 결과에 의하면 대부분 치좌표를 결정하여 최종 1개의 후보 위치좌표를 선정한 의 Ranging 오차가 ±100cm 로 측정되기 때문이다[8]. 다. 단 우선순위 4번의 비컨노드는 우선순위 3번 비컨노 드에서 선택된 후보 위치좌표 중에서 탐색이 가능하고, 4.2 제안 알고리즘( E&E ) 우선순위 3번 비컨노드는 우선순위 2번 비컨노드에서 선 상기의 설계 고려사항을 기반으로 E&E 보정 알고리 택된 후보 위치좌표 중에서 탐색이 가능하다. 마찬가지로 즘을 제안한다. E&E 보정 알고리즘은 예상 위치좌표 탐 우선순위 2번 비컨노드는 우선순위 1번 비컨노드에서 선 색기법과 AEDR의 2단계로 구성된다. 먼저 예상 위치좌 택된 후보 위치좌표 중에서 탐색이 가능하다. 표 탐색기법의 블록별 세부 수행과정은 그림 2와 같다. 최종 후보 위치좌표가 결정되면 후보 위치좌표와 4개 비컨노드 사이의 정확한 값을 테이블에서 불러와 변수 (TA, TB, TC, TD)로 저장한다. 이후 AEDR 수행 과정은 그림 3과 같다. AEDR은 첫 번째 이동노드와 4개의 비컨노드 사이에 측정된 Ranging 값 a, b, c, d 중에서 임계치 √(X2+Y2)보 다 큰 값이 몇 개 존재하는지 체크함으로 연산 수행을 시 작한다. 이때 임계치는 Ranging 되는 범위에서 a, b, c, d 가 가질 수 있는 최대의 값이다.
[그림 2] 예상 위치좌표 탐색기법의 수행과정
[그림 3] AEDR 의 수행과정
첫 번째, 4개의 비컨노드가 설치된 위치인식 범위 영 역을 설정한다. 두 번째, 위치인식 범위 영역 내에 포함되는 위치좌표 (1,1)부터 (X-1, Y-1)와 비컨노드 4개 사이의 정확한 거리 값을 테이블로 저장한다. 세 번째, 위치인식 영역 내에서 이동노드의 출발 위치 를 선택하고 출발위치와 4개 비컨노드 사이의 정확한 거
Ranging 값 중 가장 큰 Ranging 값을 제외하고 나머지 체 크된 Ranging 값은 TA, TB, TC, TD를 이용하여 대체한 다. 대체하는 방법으로는 만약 a와 c의 Ranging 값이 임 계치보다 큰 값이 측정되었고, a의 값이 c보다 크게 측정 되었을 때, c의 값은 TC의 값으로 대체한다. 이 과정을 통해서 AEDR이 가진 첫 번째 문제점을 해결한다. 세 번째, 이동노드와 4개 비컨노드 사이에 측정된 Ranging 값 a, b, c, d를 제곱한다. 네 번째, 위치인식 범위영역에 설치된 비컨노드 A와 C, B와 D의 Ranging 제곱의 합인 a2+c2, b2+d2의 크기를 비교한다. 다섯 번째, 크기가 작은 것은 예상 위치좌표 탐색 기법 에 의해 결정되어 변수로 저장된 거리 값을 이용하여 보 정한다. 그 예로 a2+c2 > b2+d2일 경우, b와 d의 값은 식 (1)과 같이 보정한다. 이 과정은 AEDR이 가진 두 번째 문 제점을 해결한다.
여섯 번째, 크기가 큰 것은 보정된 b, d의 값을 이용하 며 보정 식은 식(2)와 같다.
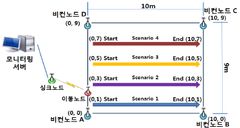
마지막으로 보정된 a, b, c, d의 Ranging 값을 버퍼에 저장하여 보정 알고리즘 수행과정을 완료한다. 5. 실험 및 결과분석 5.1 실험환경 및 실험방법 제안한 위치인식 보정 알고리즘의 성능분석 실험을 위 한 센서 네트워크는 그림 4와 같다.
[그림 4] 센서네트워크 구성
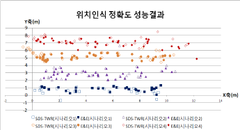
개, 모니터링 서버 1대로 구성하였으며, 비컨노드 A, B, C, D는 10m*9m의 영역에서 좌표(0,0), (10,0), (10,9), (0,9)에 배치되었다. 실험은 LOS 전파환경의 교내 강당에서 직선으로 이동 하는 4개의 시나리오를 바탕으로 위치인식 정확도 실험 이 이루어졌다. 그리고 이동노드는 무선 원격제어가 가능 한 바퀴 4개 달린 이동물체의 모터부분에 부착되어 시나 리오대로 이동하였다. 5.2 실험결과 분석 5.2.1 SDS-TWR과 E&E의 위치인식 성능비교 교내강당에서 측정된 SDS-TWR과 E&E의 위치인식 정확도 성능 결과는 그림 5와 같다. 그림 5를 확인하면 제안하는 E&E 위치인식 보정 알고 리즘이 SDS-TWR보다 위치인식 정확도 성능이 우수한 것을 확인할 수 있다.
[그림 5] 위치인식 정확도 성능결과 SDS-TWR과 E&E의 위치인식 정확도 성능을 비교한 결과는 표 3과 같다. [표 3] 위치인식 정확도 성능 비교 ( 단위 : m) S1 (1m) S2 (3m) S3 (5m) S4 (7m) TWR SDS E&E TWR SDS E&E TWR SDS E&E TWR SDS E&E 위치 인식 오차 0.41 0.28 0.54 0.39 0.52 0.29 0.93 0.39 평균 먼저, 시나리오 1~4(S1~S4)에서 측정된 SDS-TWR 위 치인식 오차 평균은 0.6m이다. 그리고 E&E를 적용한 결 과, 약 0.26m정도 위치인식 성능이 향상되었다. 시나리오 1~4에 대한 세부 내용은 다음과 같다. 시나리오 1에서 SDS-TWR은 위치인식 오차 평균이
6. 결론
위치인식 오차 고, 시나리오 시나리오 위치인식 오차 보정하였다. 다음으로 E&E의 보정 성능은 표
같다.
보정개수 (비율)
[표 4] E&E 보정 성능 ( 단위 : 개수 ) S1 S2 S3 S4 23/31 28/36 35/46 26/40 (74%) (78%) (76%) (65%)
0.28m정도 보정하였다. 그리고 시나리오 2에서 발생된 SDS-TWR의 0.54m를 0.39m로 보정하였 3과 4에서 0.52m와 0.93m의 본 논문은 SDS-TWR의 Ranging 문제점을 보완하기 SDS-TWR 평균을 각각 0.29m와 0.39m로 위해 예상 위치좌표 탐색기법을 기존의 AEDR에 적용한 E&E 위치인식 보정 알고리즘을 제안하고 위치인식 성능 4와 실험을 하였다. 그리고 실험 결과를 바탕으로 SDS-TWR 과 위치인식 성능을 비교 / 분석하고, AEDR과 보정 성능 을 비교하였다. 실험 결과, SDS-TWR은 설정된 4개의 시나리오에서 평균 0.28m의 오차가 발생하였다. 그러나 제안하는 E&E 위치인식 보정 알고리즘을 적용한 결과, 위치인식 오차 평균이 0.08m로 보정되어 약 0.20m정도 위치인식 성능 이 향상되었다. 또한 E&E는 4개의 시나리오에서 측정된 E&E 위치인식 보정 알고리즘을 적용한 결과 시나리 전체 153개의 SDS-TWR 위치인식 결과를 보정한 결과, 오 1에서는 74%의 보정 성능을 확인할 수 있고, 시나리 위치인식 성능을 향상시킨 것이 112개(약 73.2%)로 측정 오 2에서는 78%, 시나리오 3에서 76%, 시나리오 4에서 되었다. 65%의 보정 성능을 확인 할 수 있다. 이 보정성능 결과로 그리고 E&E는 AEDR과 보정성능을 비교하였을 때, 볼 때, E&E를 위치인식 시스템에 적용하면 위치인식 성 위치인식 보정 성능비율이 최대 15%만큼 우수하였다. 이 능이 향상되어 SDS-TWR보다 정밀한 위치인식 측정이 결과를 볼 때, E&E는 기존의 AEDR보다 우수한 보정 성 가능함을 확인 할 수 있다. 능을 바탕으로 SDS-TWR의 위치인식 성능을 더욱 향상 시킴으로서 더 정밀하고 안정된 위치인식이 가능하다. 따라서 E&E를 위치인식 시스템에 적용할 경우, 위치 SDS-TWR의 Ranging 인식 서비스 품질 향상에 도움을 줄 것으로 판단된다.
5와 같다. 시나리오 1과 3에서
참고문헌
2와 4에서는
9%, 15%정도
- 5.2.2 AEDR 과 E&E 의 보정성능 비교 값에 E&E와 기존의 AEDR 위치 인식 보정 알고리즘을 각각 적용하여 보정성능을 비교한 결과는 표 E&E는 기존의 AEDR과 보정성능 이 동일하거나 비슷하다. 그러나 시나리오 각각 E&E가 우수하다. 이러한 결과는 [1] Ferit Ozan Akgul, Kaveh Pahlavan, “Location E&E가 AEDR보다 위치인식 오차 보정성능이 조금 더 우 Awareness for Every Smart Computing,” IEEE, 수함을 나타낸다. Proceedings of the 16th international conference on Telecommunications, pp.2-7, May 2009. [2] Jinyang Li, John Jannotti, Douglas S. J. De Couto, [표 5] AEDR 과 E&E 의 보정성능 비교 David R. Karger, Robert Morris, “A Scalable S1 S2 S3 S4 Location Service for Geographic ad hoc Routing,” AE AE AE AE International Conference on Mobile Computing and E&E E&E E&E E&E DR DR DR DR Networking, pp.120-130, 2000. 개수 보정 23/31 23/31 25/36 28/36 36/46 35/46 20/40 26/40 [3] 이기영, 이혁준, “스마트하이웨이를 위한 유비쿼터스 ( 비율 ) (74%) (74%) (69%) (78%) (78%) (76%) (50%) (65%) 교통정보 서비스 시스템,” 한국정보과학회 논문지, 제 27권 제9호, pp.34-40, 2009. 9. [4] 김학용, 김성덕, 서동길, 지정강, 장현태, “근거리 위 따라서 위치인식 시스템에 E&E 보정 알고리즘을 적 치추적 기술 동향,” 정보통신연구진흥원, 주간기술동
- 용할 경우 기존의 AEDR보다 더 정밀하고 안정된 위치인 향 통권 1322호, pp.1-12, 2007. 11.
- 식을 할 수 있다. [5] 최창용, 이동명, “무선 센서네트워크에서 거리 식별코 드를 이용한 위치인식시스템 설계 및 구현,” 한국통
- [6] Frank Schlichting, “Prӓzise Abstandsbestimmung und Lokalisierung mittels Laufzeitmessungen (RTOF) durch Einsatz der 2.4 GHz Chirp Spreiztechnologie (CSS),” Nanotron TECHNOLOGIES, Wireless Technologies Kongress 2007.
- [7] IEEE 802.15.4a, “Part 15.4 : Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal Area Network (LR-WPANs),” rdafr P802.15.4a/D7, Jan. 2007.
- 이 동 명 (Dong Myung Lee) [정회원] • 1982년 2월 : 숭실대학교 전자계 산학과(학사) • 1990년 8월 : 숭실대학교 전산공 학과(석사) • 1997년 8월 : 숭실대학교 전자계 산학과(박사) • 1982년 3월 ~ 2000년 2월 : 한 국전자통신연구원 책임연구원
- • 2000년 3월 ~ 현재 : 동명대학교 컴퓨터공학과 교수
- [8] 권성기, 이호철, 이동명, “정밀한 위치인식을 위한 CSS기반 TWR과 SDS-TWR 의 성능 비교,” 한국통 신학회, 2009년 하계 학술발표논문집 Vol.39, pp.888, 2009. 6.
- <관심분야> 이동통신시스템, 센서네트워크, 지능형 로봇제어
- [9] 권성기, 이동명, “균등거리비율을 적용한 위치인식 보 정 알고리즘 설계 및 성능분석,” 한국산학기술학회논 문지, 제11권 제4호, pp.1248-1253, 2010. 4.
- [10] Yi Jiang, Victor C.M. Leung, “An Asymmetric Double Sided Two-Way Ranging for Crystal Offset,” ISSSE '07, pp.525-528, Aug. 2007.
- [11] 전현식, 우성현, 조상도, 나종인, 김기환, 박현주, “IEEE 802.15.4a 기반의 환경 적응형 위치 추적 시스 템에 관한 연구,” 한국통신학회 논문지 06-5 Vol.31 No5A, pp.526-536, 2006. 5.
- 이 창 범 (Chang Bum Lee) [정회원] • 1979년 2월 : 서강대학교 전자공 학과(학사) • 1990년 8월 : 서강대학교 전자공 학과(석사) • 1996년 8월 : 서강대학교 전자공 학과(박사) • 1983년 3월 ~ 1998년 8월 : 한 국전자통신연구원 책임연구원
- [12] 정동규, 류우석, 박재관, 홍봉희, “RTLS를 위한 위 치 보정 기법의 설계 및 구현,” 한국GIS학회, 2008 공동춘계학술대회, pp.286-292, 2008. 6.
- • 1998년 9월 ~ 현재 : 영산대학교 컴퓨터공학과 부교수
- <관심분야> 영상통신, 통신시스템, 영상처리, 센서네트워크 등
- [13] 권성기, 이동명, “하이브리드형 위치인식 보정 알고 리즘 성능 분석 및 평가,” 한국산학기술학회 논문지, 제11권 제6호, pp.2263-2268, 2010. 6.
- 권 성 기 (Seong Ki Kwon) [준회원] • 2009년 2월 : 동명대학교 컴퓨터 공학과(학사) • 2009년 3월 ~ 현재 : 동명대학 교 컴퓨터미디어공학과 석사과 정
- <관심분야> USN, RTLS, RSS, Ranging